煤炭科学技术03-14
本文创新点

研究方向
主要成果
作 者
单 位
1.山东工商学院 信息与电子工程学院;2.北京天玛智控科技股份有限公司;3.中煤华晋集团有限公司;4.兖矿能源集团股份有限公司 设备管理中心

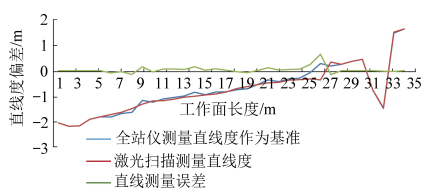
智能化综采工作面安装了大量固定传感器,但依然存在监控盲区和监控滞后的问题。引入巡检机器人技术,对综采工作面的全覆盖和实时监控,是智能化开采的必要技术手段。从国家宏观政策和智能开采技术2个层面,分析了智能开采对综采巡检机器人的迫切需求,根据综采工作面巡检机器人的发展现状,总结了综采工作面应用机器人需要解决的柔性轨道、移动通信无缝漫游、远程控制和自主操作等技术难题。通过研究用于综采巡检机器人的跨式柔性轨道、行走控制、移动通信、移动精确定位、惯性导航、动态图像采集和控制采煤机调高等7项关键技术,提出了建立巡检机器人的感知理论技术装备体系、研究井下机器人动力供应技术、建立高性能的无缝漫游移动通信系统、开发超高清热成像和毫米波对综采生产时的三维实景呈现技术、研制集成视觉雷达和煤层探测的超前探测机载装置等5个重点研究方向。在薄煤层综采工作面进行了工业试验,研制的巡检机器人搭载三维激光雷达和惯性导航系统,沿采煤机电缆槽上铺设的轨道边行走边检测,达到了60 m/min的最大巡检速度,实现了双频WiFi零切换的无缝漫游高速通信,根据机载激光雷达扫描和惯性导航系统建立了综采工作面三维截割地质模型,进行了巡检模式下的智能割煤工艺试验,工作面直线度检测和找直偏差不超过150 mm,验证了巡检机器人能够为智能开采提供安全、高效的技术保障。

研究背景
内容概要
1 智能开采对综采机器人的需求
1.1 国家支持煤炭开采智能化应用机器人技术
1.2 综采巡检机器人发展中的问题
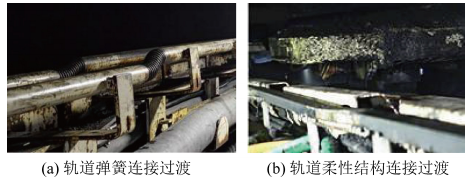
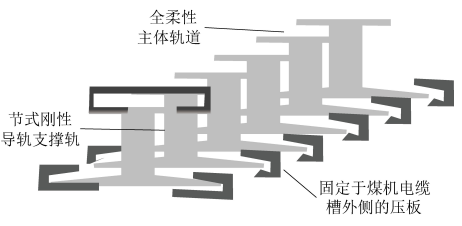
1.2.1 巡检柔性轨道
1.2.2 移动通信无缝漫游
1.2.3 控制和操作功能
1.3 综采工作面巡检机器人研发现状
2 综采巡检机器人技术体系
2.1 巡检机器人技术体系
2.2 综采巡检机器人技术研究重点方向
3 综采巡检机器人关键技术
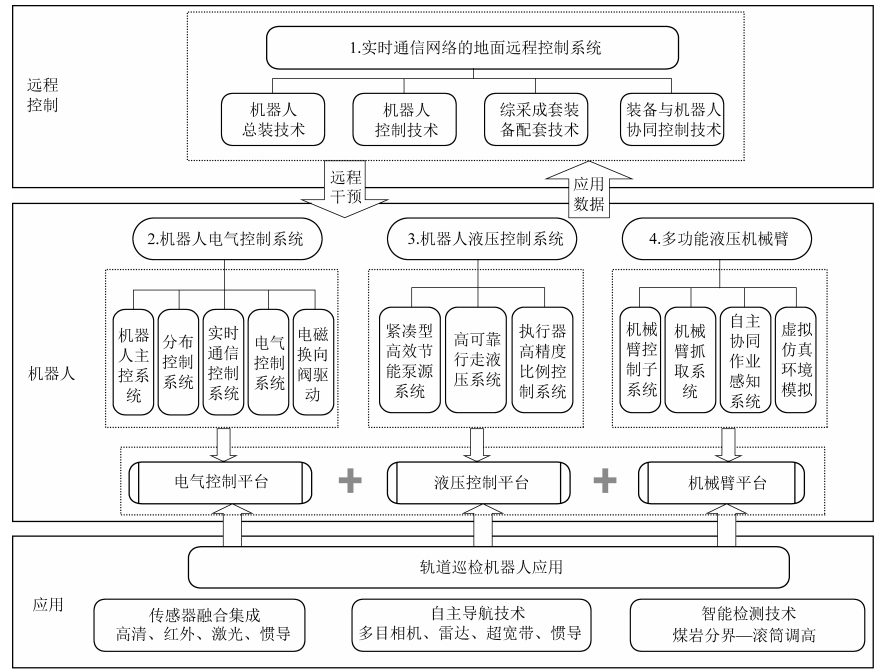
图 2 综采巡检机器人技术体系
3.2 行走控制技术
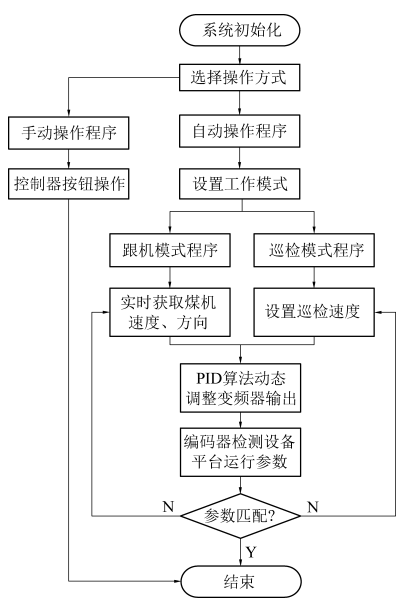
图5 巡检机器人行走控制软件流程
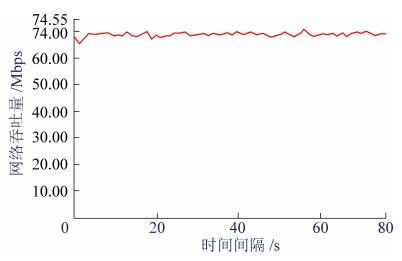
3.3 通信网络体系技术

1)高精度定位系统。
2)激光三维扫描技术。
3)减速开关与限位开关。
4)轴编码器。

3.5 惯性导航技术
3.6 巡检动态图像采集技术
3.7 综采巡检机器人控制采煤机调高技术

图 8 巡检机器人移动视觉图像处理过程
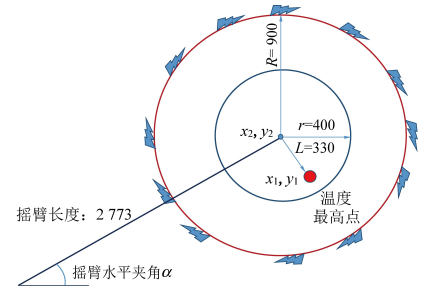
图 9 热成像测量滚筒坐标转换

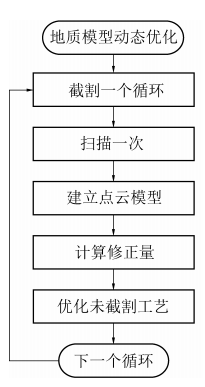
图10 智能截割模板调整
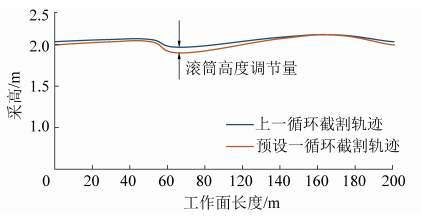
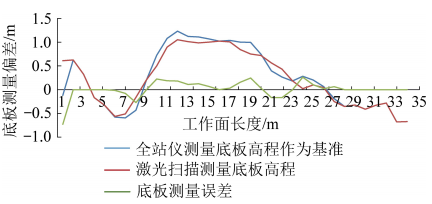
图 11 巡检模式下滚筒高度调节
结 论
1)从国家政策要求和煤矿智能化无人开采技术发展2个层面,提出了巡检机器人发展需要解决的巡检柔性轨道、移动通信无缝漫游、控制和操作等方面的问题,阐述了综采工作面巡检机器人研发现状,指出目前研究处于起步阶段。
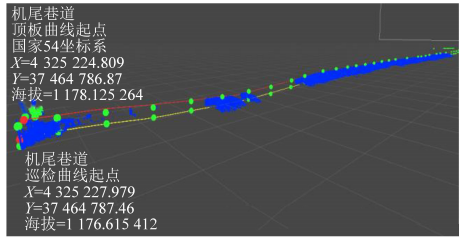
2)从综采巡检机器人整体结构、控制、驱动行走、供电、移动通信、机械臂和协同控制等方面,建立综采巡检机器人技术体系,总结了综采巡检机器人技术研究的 5 个重点方向。 3)系统分析了综采巡检机器人的跨式柔性轨道、行走控制、零切换快速漫游和控制采煤机调高技术等关键技术。 4)综采巡检机器人在神东榆家梁煤矿43101综采工作面进行了试验,在工作面刮板输送机电缆槽上铺设轨道,综采巡检机器人搭载三维激光扫描仪和惯性导航系统,最大巡检速度60m/min。 进行了巡检无缝漫游快速切换试验,通过采用双频 WiFi基站实现通信系统无缝漫游快速切换;进行了巡检三维建模试验,获取了基于点云的工作面三维地质模型;进行了巡检智能割煤工艺试验,复测割煤工艺误差不超过150mm。
结 论
引用格式
张守祥,张学亮,张磊,等.综采巡检机器人关键技术研究[J].煤炭科学技术,2022,50(1):247-255.
ZHANG Shouxiang, ZHANG Xueliang, ZHANG Lei,et al.Research on key technology of patrol robot in fully-mechanized mining face[J].Coal Science and Technology,2022,50(1):247-255.
免责声明:以上内容转载自煤炭科学技术,所发内容不代表本平台立场。
全国能源信息平台联系电话:010-65367702,邮箱:hz@people-energy.com.cn,地址:北京市朝阳区金台西路2号人民日报社




