煤传媒08-31
通过采取本安兼隔爆的防爆设计技术和结构轻量化优化设计方法,在使机器人满足防爆性能的同时尽可能减轻机器人的重量;根据煤矿地形特点,研发了地形适应性好行走能力强的梯形弹簧履带式机器人行走机构;针对井下通信困难,有线或无线通信方式均存在通信距离短的问题,提出并采用有线和无线相结合的多机器人协同通信技术,大大提升了机器人的通信能力;为了减少对机器人的人工干预,提升机器人的智能化水平,对机器人的环境感知和自主行走进行了深入研究,在CUMT-V(A)型煤矿救援机器人的基础上研发的CUMT-V(B)型机器人已具有一定的自主能力。
朱 华,由韶泽
中国矿业大学 机电工程学院
煤矿救援机器人属于特种机器人的一种,主要执行矿难之后的井下环境探测任务,获取灾后环境信息(气体体积分数、温度和灾害场景等),为救援决策提供依据。国外较早开展了煤矿救援机器人的研发,并有部分机器人投入了尝试性应用,如美国的V2煤矿机器人,Gemini-Scout搜救机器人,加拿大的Micro VGTV机器人,以及澳大利亚的Numbat遥控无人驾驶急救车等。但就在仅有的几例救援应用中也因为电器短路、机械故障或通信中断等因素未能完成期望的任务与功能。国内煤矿救援机器人研发起步较晚,到目前为止基本上还处在实验室阶段。
中国矿业大学是国内率先开展煤矿救援机器人研发的单位,经过十多年的努力,研发了多种类型的CUMT系列煤矿救援机器人。其中CUMT-V(A)型煤矿救援机器人于2016年在山西大同塔山煤矿进行了现场示范应用,并取得了很好的应用效果,为煤矿救援机器人的研发应用积累了宝贵的经验。
煤矿救援机器人是一种在矿井发生灾害事故时,替代救护队员进入危险区域进行环境探测和对矿工实施救援的多功能智能救援装备,其应用对提升煤矿灾后救援效率、减少2次伤亡具有重要的意义。以中国矿业大学CUMT-V系列煤矿环境探测与救援机器人的研发为例,从行走机构、防爆设计、结构轻量化、通信方法、传感探测和智能化等方面进行了相关技术和理论研究。
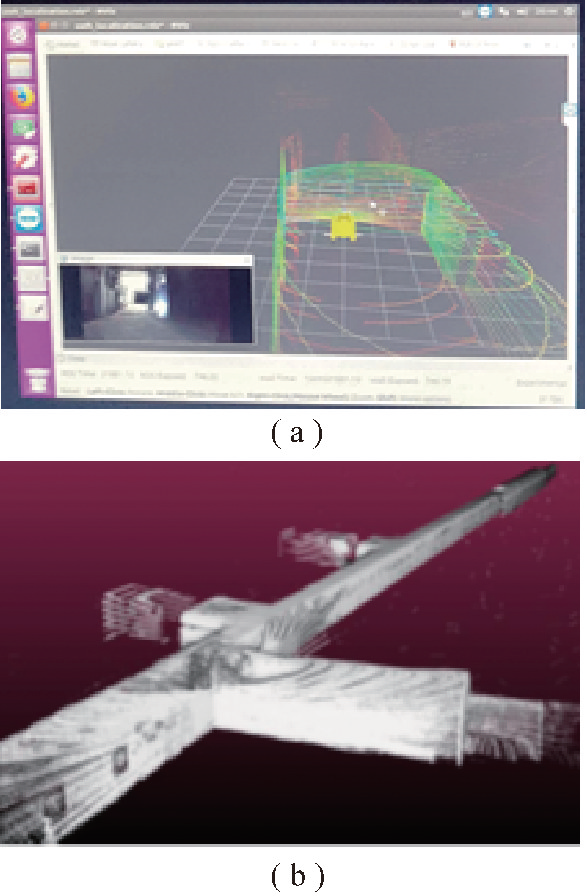
针对灾后煤矿的巷道环境特点,推演了机器人行走机构的基本构型,设计了地形适应性好、越障能力强的机器人行走机构;提出并采用基于短时防爆理论的本安兼隔爆的机器人防爆设计技术;提出了基于多腔体自加强结构的机器人轻量化优化设计方法;采用了有线和无线相结合的机器人通信方式;搭建了机器人传感探测与运动控制系统;研发了机器人井下地图构建和定位导航技术。从而研制了能够承载多种探测传感器和急救装备的煤矿灾后环境探测救援机器人,并取得了国家煤矿安全认证。
井下应用试验及性能测试结果表明,机器人的行走能力强,能够适用于煤矿非结构复杂地形;机器人续航能力强,通信距离长,环境感知和信息传输的可靠性高;能够通过遥控方式实现机器人的灾后救援;采用有线和无线相结合的机器人通信技术可实现多台机器人的协同救援。
通过对机器人进行智能化升级,提高了煤矿救援机器人的环境感知能力,并使其具备了实时定位与自主行走的功能。将上述技术的组合进一步完善,可研发出满足不同应用需求的煤矿环境探测、监控、救援机器人。
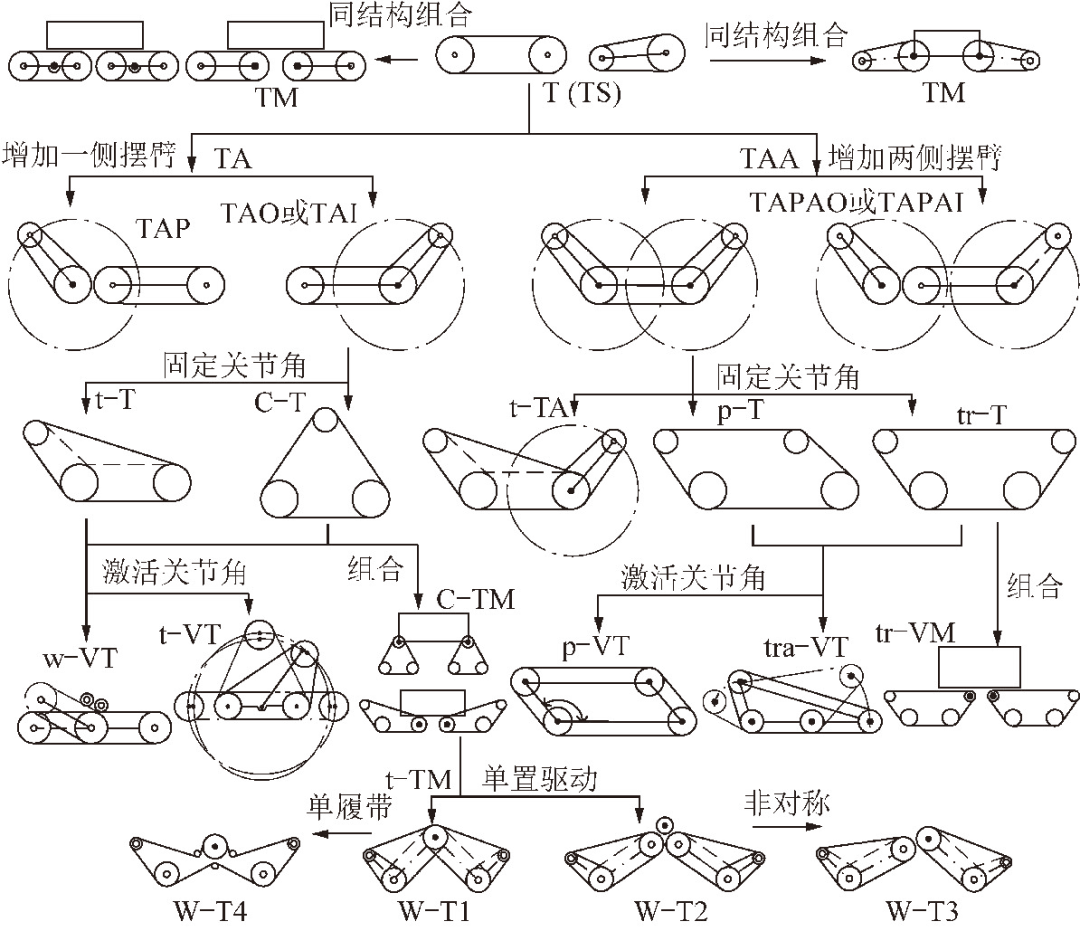
履带式行走机构构型推演

通过性示意
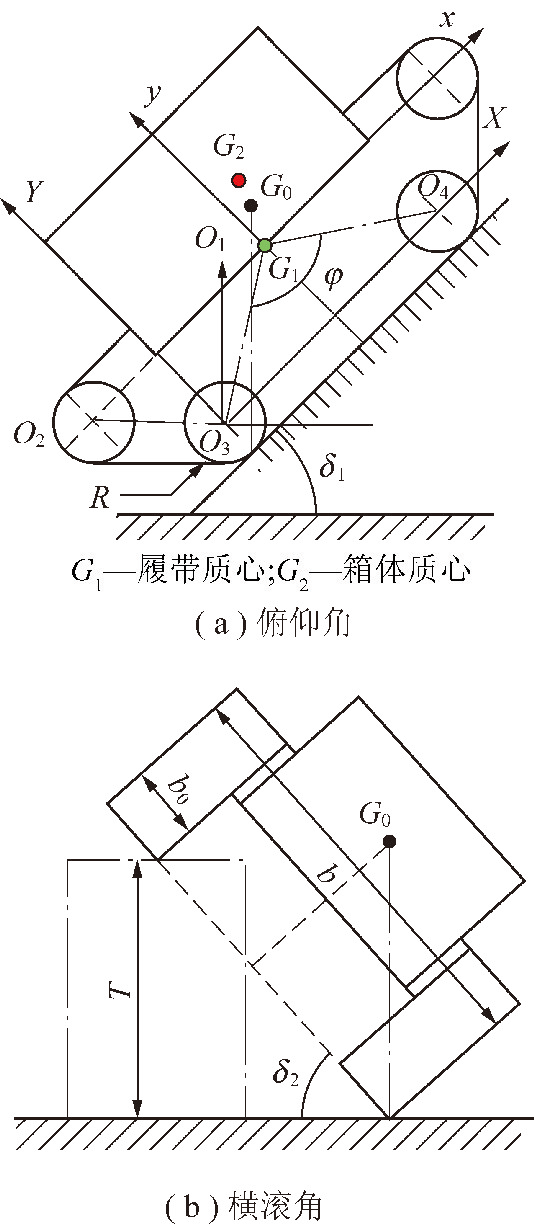
机器人倾覆极限
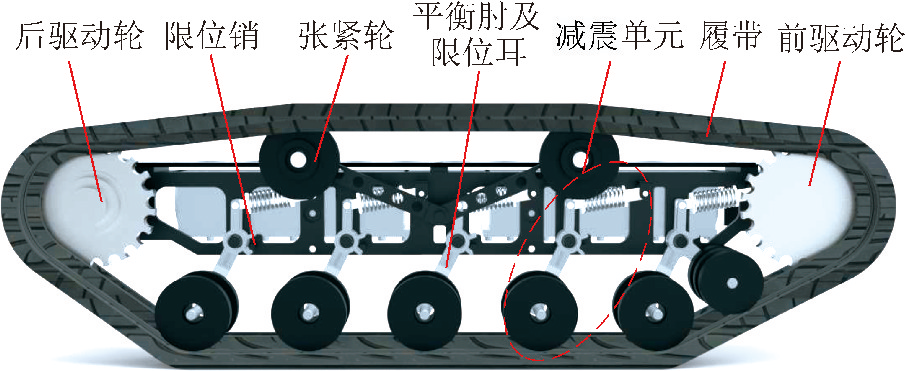
梯形履带悬架
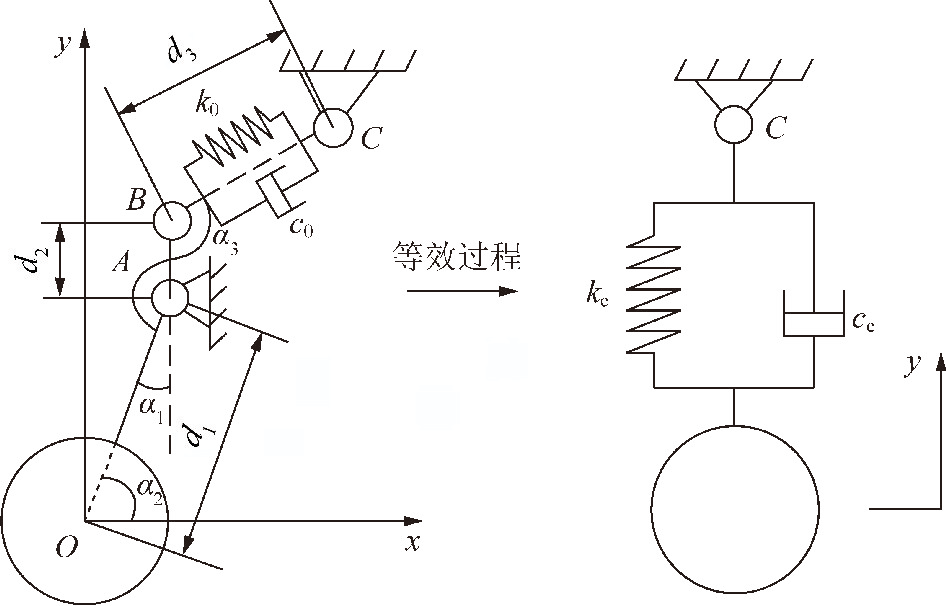
单个减震单元的动力学模型
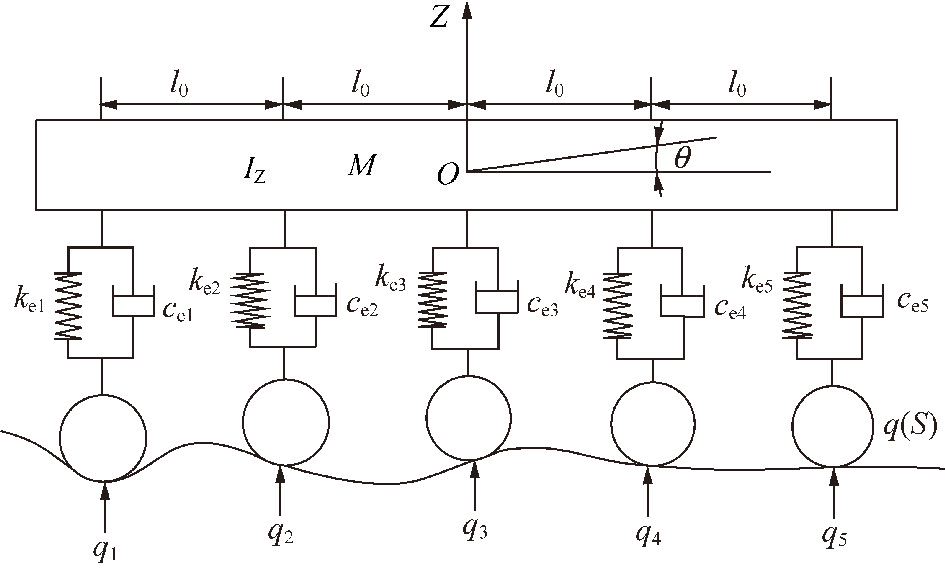
单侧履带单元动力学模型
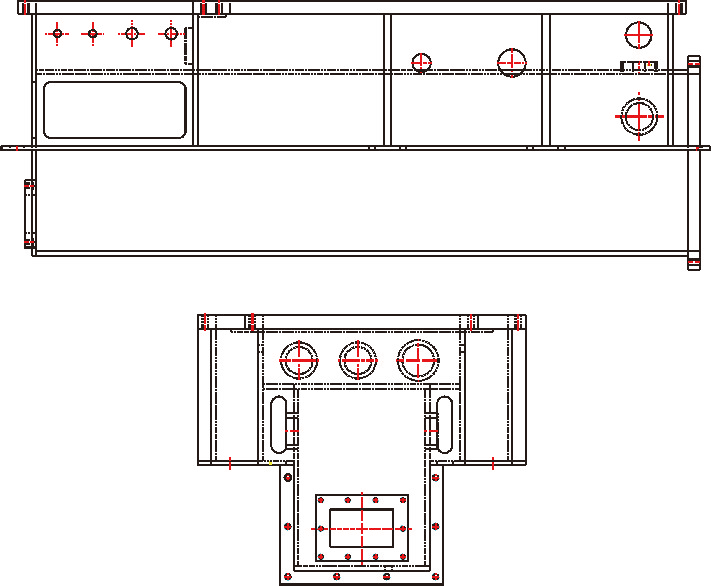
CUMT-V机器人主箱体设计
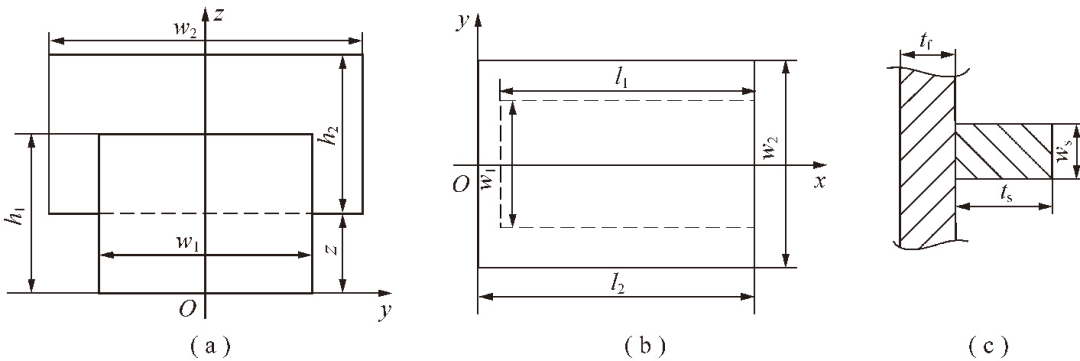
主箱体优化模

隔爆箱体仿真分析
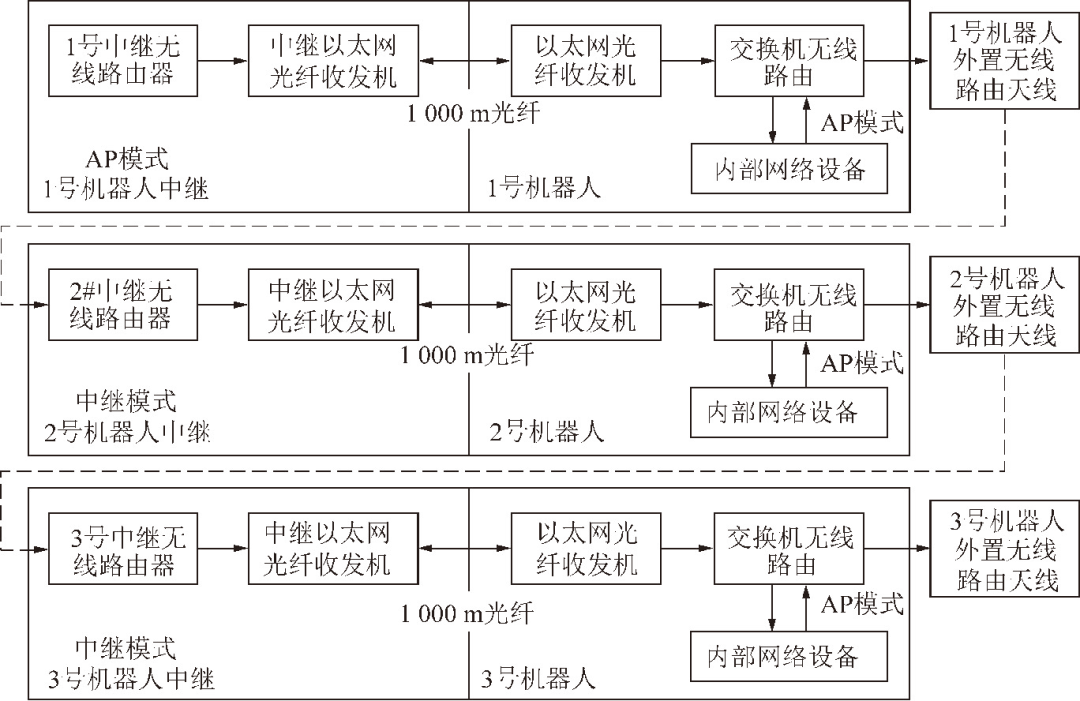
有线-无线结合通信方式
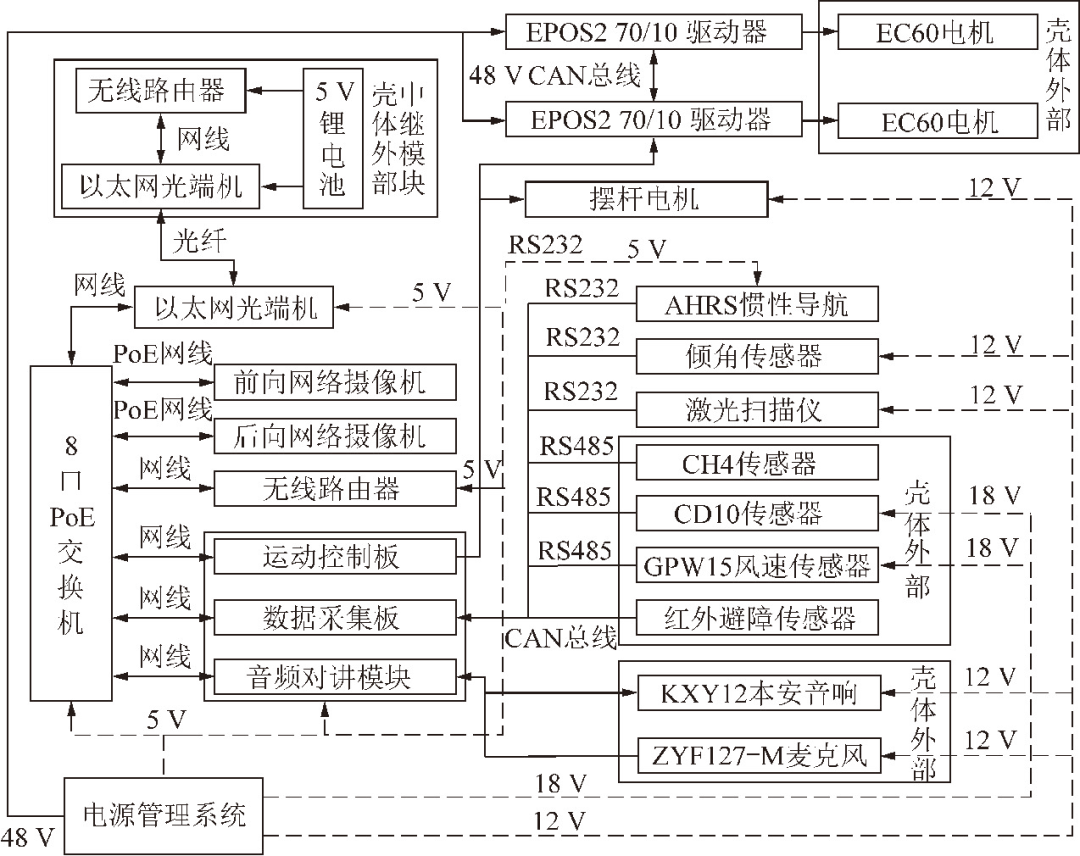
基于以太网的探测与控制系统结构

甲烷传感器

机器人终端
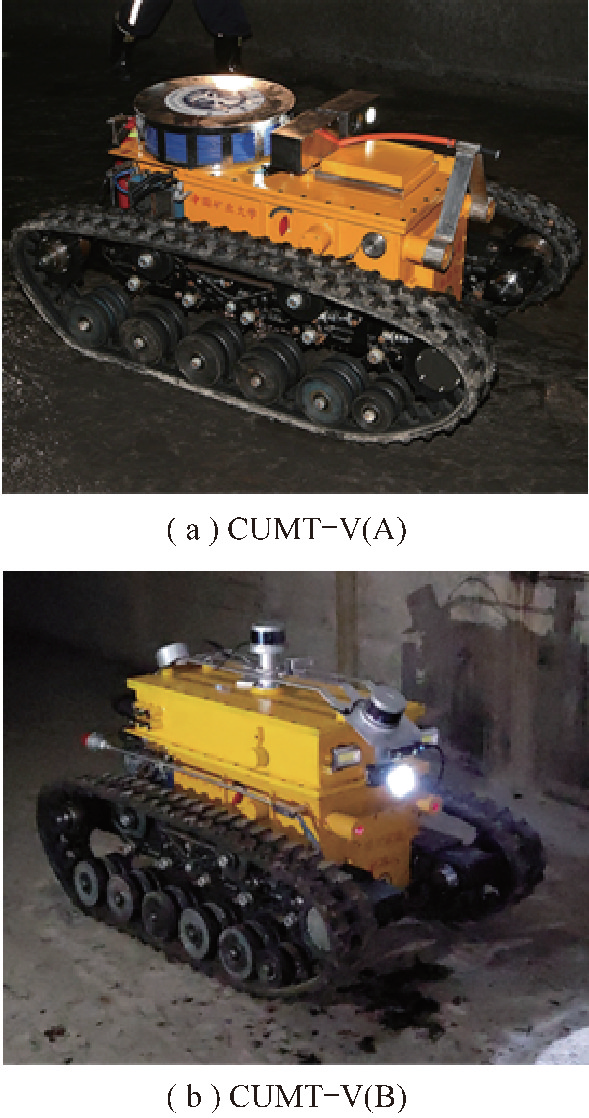
CUMT-V型煤矿探测救援机器人

塔山煤矿现场试验

极端环境性能测试
模拟巷道试验

研究方向:机械设计及理论,车辆工程
主要成果:
朱华,由韶泽.新型煤矿救援机器人研发与试验[J].煤炭学报,2020,45(6):2170-2181.
ZHU Hua,YOU Shaoze. Research and experiment of a new type of coal mine rescue robot[J]. Journal of China Coal Society,2020,45(6):2170-2181.

文章来源:煤炭学报
尊重原创,如有侵权,请联系删除。
免责声明:以上内容转载自煤传媒,所发内容不代表本平台立场。
全国能源信息平台联系电话:010-65367702,邮箱:hz@people-energy.com.cn,地址:北京市朝阳区金台西路2号人民日报社





